방법 요약 설명
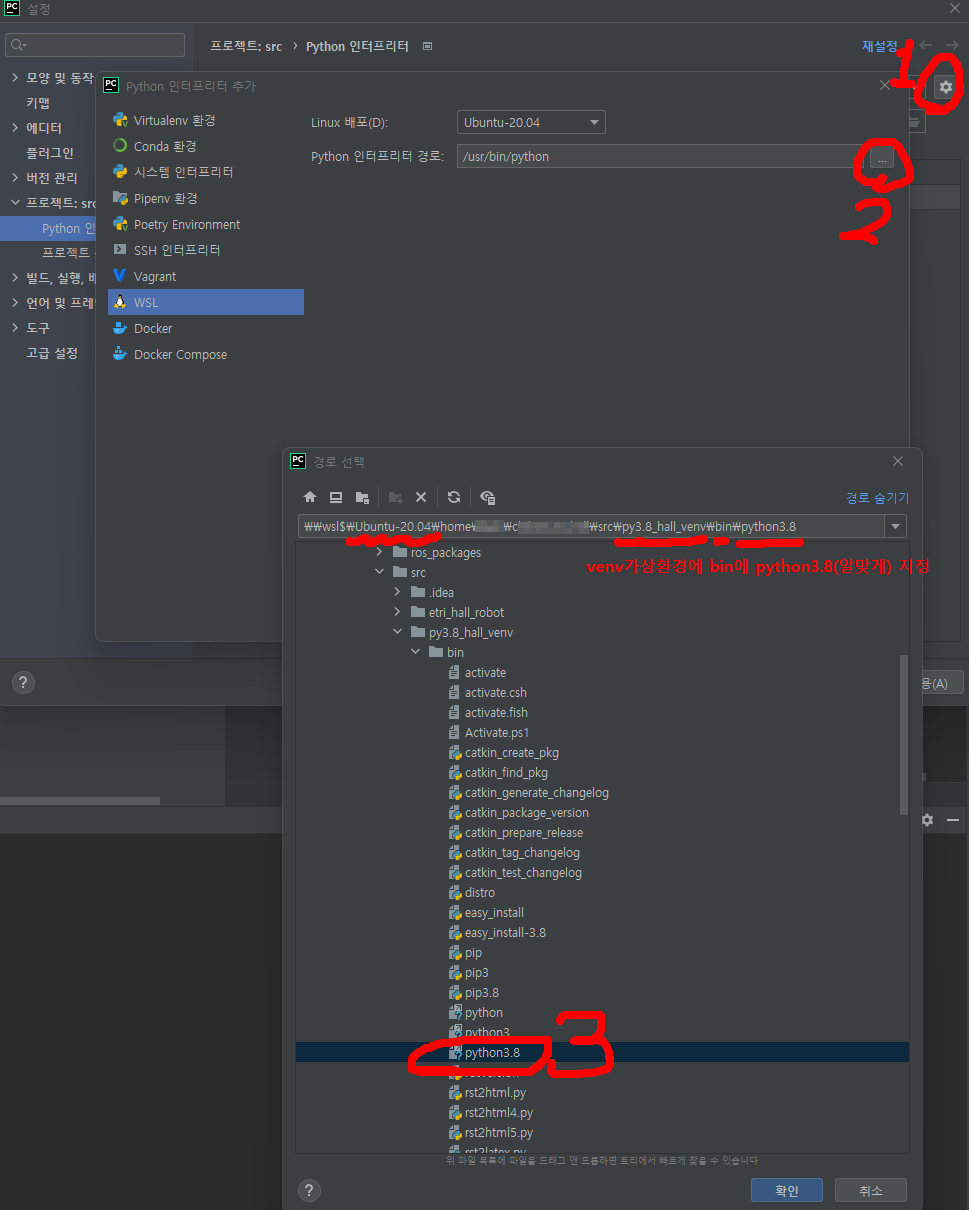
1. 인터프리터로 wsl2에 venv환경을 잡고
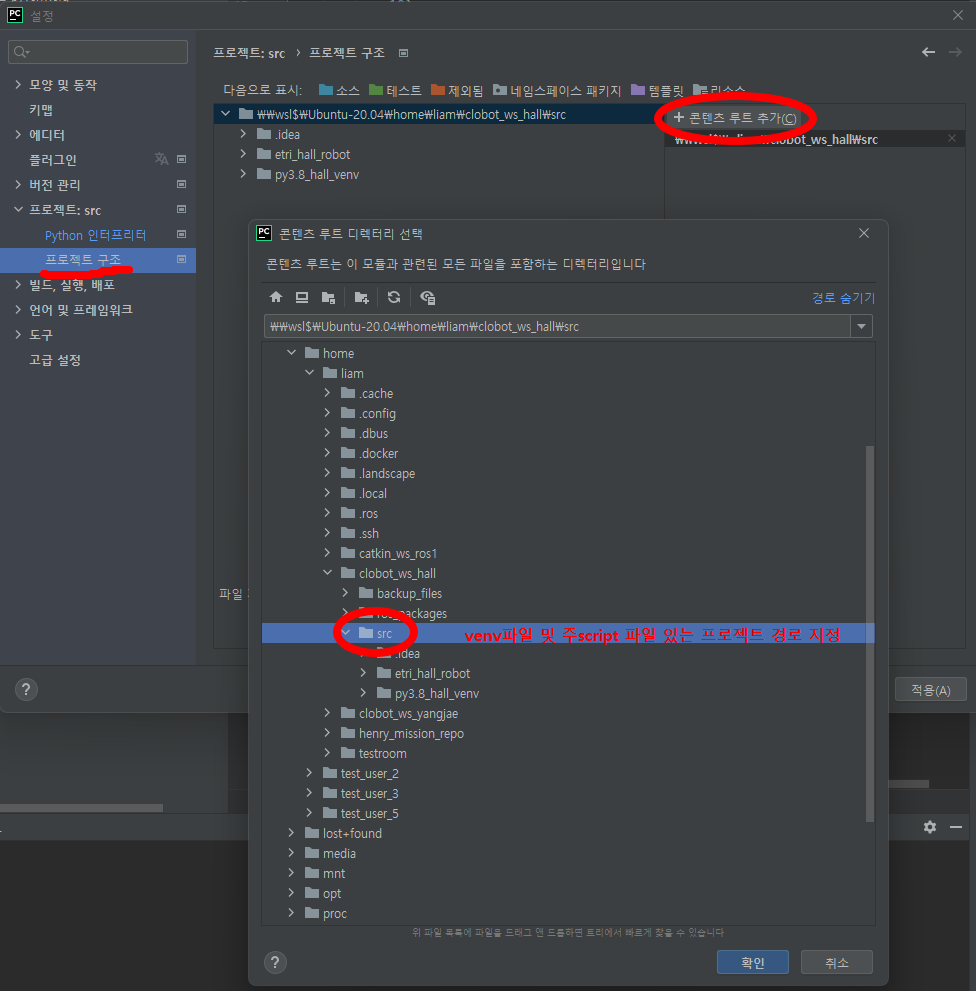
2. 콘텐츠 추가로 스크립트랑 venv가 있는 폴더를 추가한다.
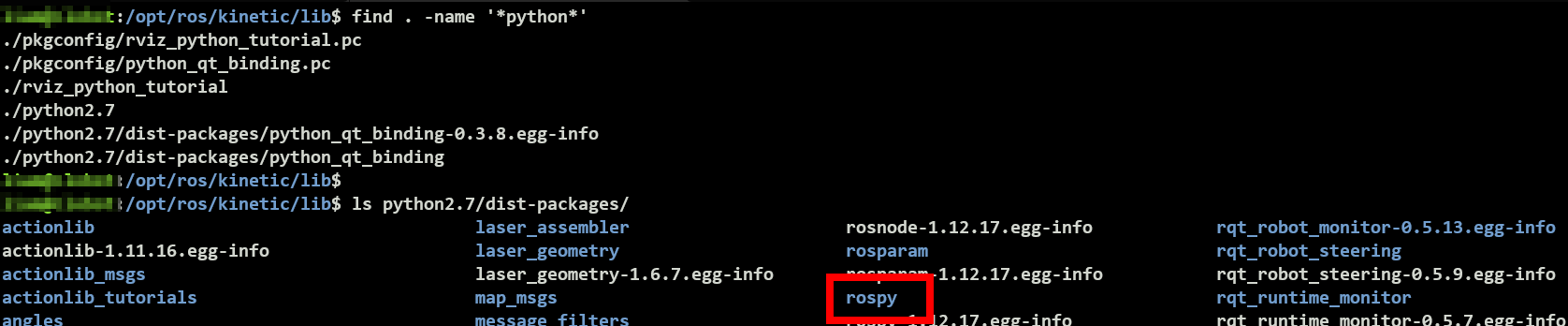
3. 로컬에 있는 /opt/ros/로스버전/lib 에 있는 python패키지에 sit-packages or dist-packages를 추가함
3번을 하는 이유 : 실행하면 잘되지만, pycharm에서 빨간줄이 그어진다. 왜냐면 venv에 있는 python3.8라이브러리인 rospkg가 로컬에 있는 ros라이브러리인 rospy를 참조를 못해서임 ( 실제론 참조하지만 pycharm안에서는 못하는 상황 )
1. python 인터프리터 설정 ( venv가상환경 라이브러리 연동 )
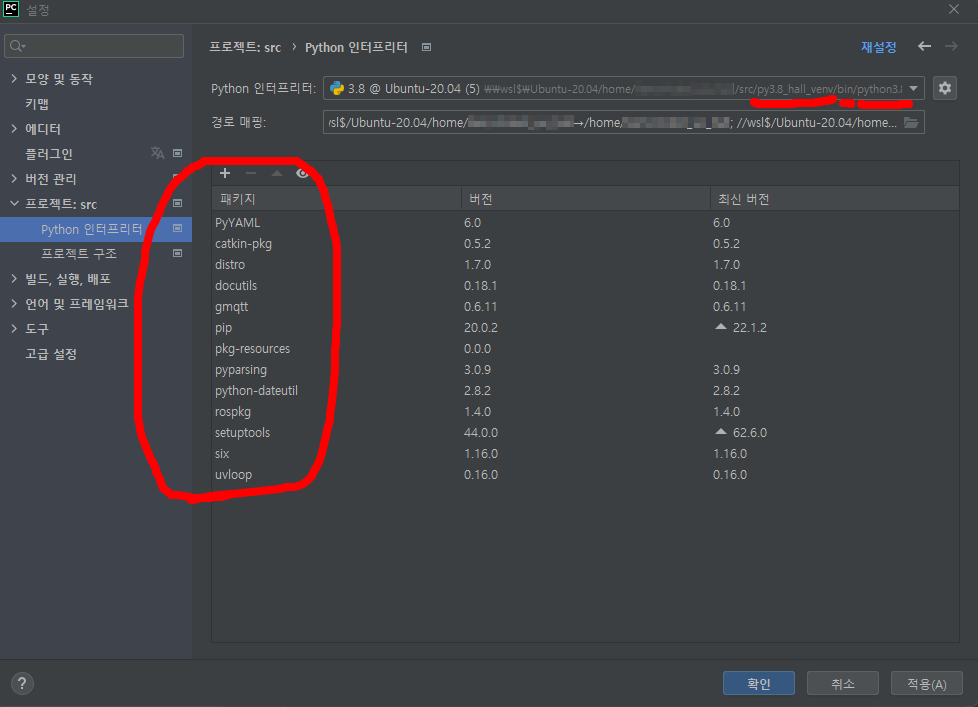
2. python 인터프리터 관련 가상환경 셋업 확인
3. 사용할 프로젝트 구조 경로 설정( 주 script 파일 과 venv가 있는 폴더 경로 )
4. ROS2 site-packages 경로lib들 프로젝트로 추가 시킴 ( ros2 라이브러리 연동 )

5. ROS2 경로 프로젝트로 추가 됬는지 확인

'협업툴,가상환경 정리 > pycharm,wsl2,vscode 관련' 카테고리의 다른 글
| vscode tab 2칸으로 쓰기 (0) | 2024.10.15 |
|---|---|
| vscode 단축키 모음 (0) | 2024.06.26 |
| ssh 원격 script 를 pycharm으로 열기 (0) | 2022.08.19 |
| wsl2 단축키 정리 (0) | 2022.06.03 |
| pycharm 단축키 팁 (0) | 2022.04.18 |

댓글