ROS2 msg sub 부분
code :
# ===========================================================================================
# !/usr/bin/python
# -*- coding: utf-8 -*-
import rclpy
from rclpy.executors import Executor # noqa: F401
from rclpy.qos import QoSProfile
import threading
import time
from std_msgs.msg import String
class SubNodeMakerAgent:
"""
멀티 쓰레드 에 멀티 노드 구조
멀티쓰레딩 subscribe 내용을 참조 사이트
https://answers.ros.org/question/377848/spinni_sigint_gcng-multiple-nodes-across-multiple-threads/
"""
def __init__(self, _module_info):
"""
"""
self._executor = None
self._module_info = _module_info
self._qos_profile = QoSProfile(depth=10)
self._node_obj = None
def set_up_sub(self):
print('setup stat')
self._create_node()
self._node_obj_create_subscription()
print('setup end')
def _create_node(self) -> None:
"""
node object 생성
"""
if rclpy.ok():
pass
else:
rclpy.init()
_node_name = self._module_info['node_info']['node_name']
self._node_obj = rclpy.create_node(_node_name)
def _node_obj_create_subscription(self) -> None:
"""
executor에 등록된 node_obj에 type,topic_name,콜백함수,qos 정보 삽입
"""
self._node_obj.subscription = self._node_obj.create_subscription(
self._module_info['node_info']['msg_type'],
self._module_info['node_info']['topic_name'],
self._module_info['node_info']['callback_func'],
self._qos_profile)
def get_node_obj_id(self):
return self._node_obj
#--------------------------#--------------------------#--------------------------#--------------------------
#--------------------------#--------------------------#--------------------------#--------------------------
if __name__ == '__main__':
# sub_1 용 #--------------------------#--------------------------#--------------------------
def subscribe_module_1_info_callback(msg) -> None:
print('hihi i got msg : [{}]'.format(msg))
NODE_NAME_1_SUB = 'sub_thread_test_1'
MSG_TYPE_1_SUB = String
TOPIC_1_SUB = '/sub_thread_test_1/test'
RATE_HZ_1_SUB = '2.0'
CALLBACK_1_SUB = subscribe_module_1_info_callback
_subscribe_module_1_info = {
'module_name': NODE_NAME_1_SUB,
'node_info': {
'node_name': NODE_NAME_1_SUB,
'msg_type': MSG_TYPE_1_SUB,
'topic_name': TOPIC_1_SUB,
'rate_sec': RATE_HZ_1_SUB,
'callback_func': CALLBACK_1_SUB
}
}
class aa():
def __init__(self):
_subscribe_module_1_obj = SubNodeMakerAgent(_subscribe_module_1_info)
_subscribe_module_1_obj.set_up_sub()
self._sub_node_1_obj = _subscribe_module_1_obj.get_node_obj_id()
self._executor = rclpy.executors.SingleThreadedExecutor()
def run(self):
self._executor.add_node(self._sub_node_1_obj)
_executor_thread = threading.Thread(target=self._executor.spin, daemon=True)
_executor_thread.start()
# _executor_thread.join()
a = aa()
a.run()
while rclpy.ok():
time.sleep(3)
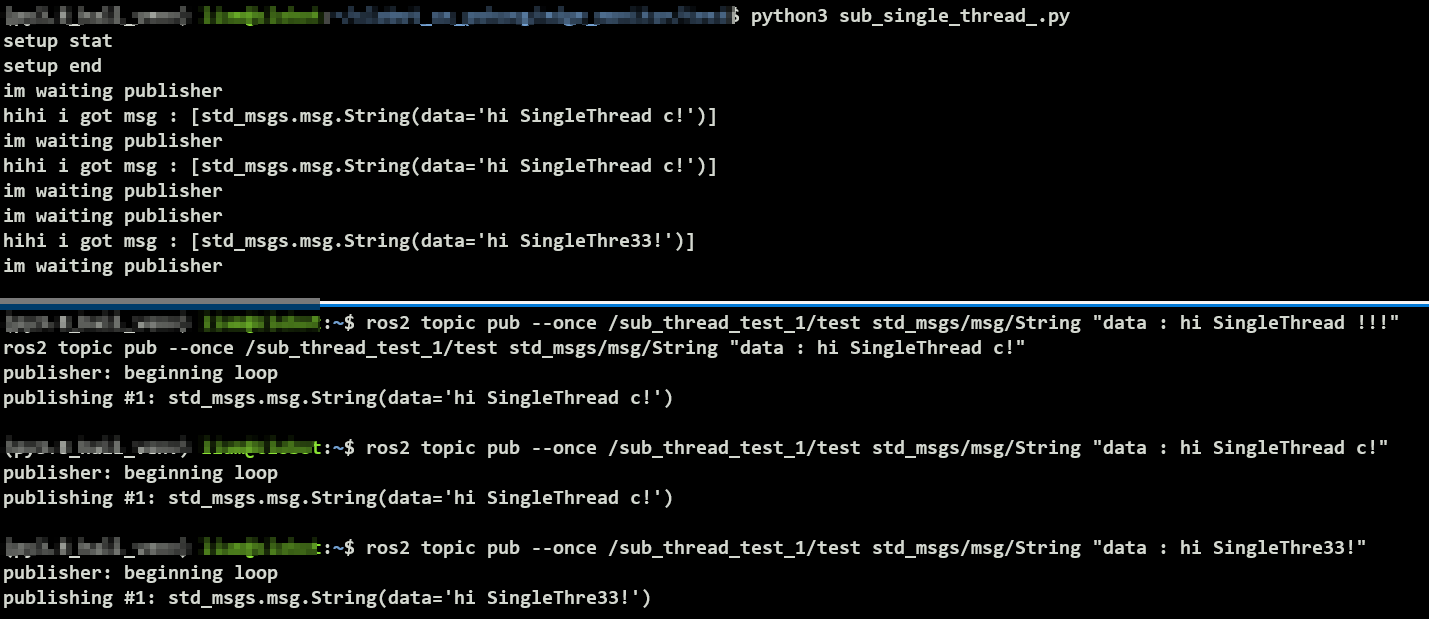
print('im waiting publisher')
# 다른 터미널에서 이 명령어 쳐서 받는지 확인하면 끝
# ros2 topic pub /sub_thread_test_1/test std_msgs/msg/String "data : hi SingleThread !"결과 출력값
ROS2 msg pub 부분
code : 이코드는 개별실행 안됨. 위에 sub코드처럼 네이밍 해주는 부분이 있어야함, Thread 스타트 하는 부분도 따로 빼지 않고 Agent 클래스 내부에서 실행 하는 차이가 있음
# ===========================================================================================
# !/usr/bin/python
# -*- coding: utf-8 -*-
import rclpy
# from rclpy.node import Node #노드를 상속해서 쓰지 않음
from std_msgs.msg import String
from rclpy.executors import Executor # noqa: F401
import threading
import logging
import time
from constant_1.enum_1 import *
from rclpy.qos import QoSProfile
class PubNodeMakerAgent(object):
"""
싱글 쓰레드 에 싱글 노드 구조
"""
def __init__(self, node_name, msg_type, topic_name, time_period):
"""
:param node_name : rclpy.executors에 등록할 node 명
:param msg_type : 보낼 msg의 타입
:param topic_name : 지정할 topic 이름
:param time_period : timer callback 함수 주기
"""
self._logger = logging.getLogger("pub_maker")
self._logger.setLevel(logging.DEBUG)
self.a = logging.StreamHandler()
self._logger.addHandler(self.a)
self.node_name = node_name
self.msg_type = msg_type
self.topic_name = topic_name
self.time_period = time_period
self.executor = None
self.node = None
self._i = 0
self.qos_profile = QoSProfile(depth=10)
# rclpy.init()
def __del__(self):
self._logger.warning("__del__ on")
self.node.destroy_node()
rclpy.shutdown()
def __call__(self, *args, **kwargs):
pass
def node_maker(self) -> None:
"""
노드 생성
노드 이름을 기준으로 멀티쓰레드Executor에 add해주는 방식이므로 중요함
:return:
"""
self.node = rclpy.create_node(self.node_name)
def node_adder(self) -> None:
"""
???????????????????
멀티쓰레드 Executor를 쓰고 있음 . 싱글쓰레드 Executor 사용 하기 가능하다.
:return:
"""
self.executor = rclpy.executors.SingleThreadedExecutor()
self.executor.add_node(self.node)
def node_pub_binder(self) -> None:
"""
1. node랑 publisher의 config 파일을 binding 해줌
2. node에 timer_callback 함수를 등록(register) 해줌
여기서는 받을 만한 신호가 딱히 없으므로 특정시간마다 publish 신호가 오도록 구성함.
ex) 센서data , 특정 플래그 신호가 on 시, publish
:return:
"""
self._logger.debug("qos profile type is : [{}]".format(type(self.qos_profile)))
self.node.publisher = self.node.create_publisher(self.msg_type, self.topic_name, self.qos_profile)
timer_period = self.time_period
self.node.timer = self.node.create_timer(timer_period, self.timer_callback)
def node_executor(self) -> None:
"""
threading.Thread(target=self.executor.spin, daemon=True)
"target=self.executor.spin_once()" 이부분에서 target 이 spin_once 일시엔, 한번만 publish하고 ros가 shutdown 된다.
:return:
"""
executor_thread = threading.Thread(target=self.executor.spin, daemon=True)
# executor_thread = threading.Thread(target=self.executor.spin_once(), daemon=True)
executor_thread.start()
# # join 의미 쓰레드가 끝나기전에 main 쓰레드가 끝나지 않도록 기다려 달란의미 while True 해도됨
# executor_thread.join()
def timer_callback(self) -> None:
"""
특정시간마다 등록된 node의 timer_callback 함수가 동작하고 timer_callback 함수에서 publish를 한다.
:return:
"""
msg = String()
msg.data = 'Hello World: %d' % self._i
self.node.publisher.publish(msg)
self._logger.info(
'modul->edge_server pub !! -> node_name : [{}] , msg.data : [{}] , topic_name : [{}]'.format(self.node_name,
msg.data,
self.topic_name))
self._i += 1
def run_pub(self) -> None:
self.node_maker()
self.node_adder()
self.node_pub_binder()
self.node_executor()
if __name__ == '__main__':
rclpy.init()
pub_1 = PubNodeMakerAgent(node_name=ROS2_MODULE_1_PUB_NODE,
msg_type=ROS2_MSG_TYPE_STR,
topic_name=ROS2_MODULE_1_SUB,
time_period=2)
pub_1.run_pub()
i = 0
while rclpy.ok():
i = i + 1
time.sleep(1)
'ros2_python > Ros2 msg,srv,action,parm' 카테고리의 다른 글
| ROS2_msg_pub_sub_multithread_python (0) | 2022.07.21 |
|---|---|
| ros2_msg 토픽 example(executor사용==멀티쓰레드) (0) | 2022.07.05 |
| ros2_python코드에서 param 데이터 사용법 (0) | 2022.04.27 |
| 사용자 정의 ros2 msg, srv파일 구성 (0) | 2022.04.27 |
| ros2_srv 토픽 simple example (0) | 2022.04.27 |



댓글