subscription 2개
publisher 2개
비동기로 ros spin 돌리는 방법 2개
1. Thread
2. couroutine // asyncio
구조
Ros2Handler -> ThreadAgent
Ros2Handler -> AsyncAgent
추가 설명
Thread 같은경우엔 rclpy 에서 제공하는 Excutor Class 를 이용하면 되지만,
Asyncio 로 돌리고 싶어도 spin 함수에 들어가면 실행권을 가져올 수 가 없다.
spin_once 로 while 문돌려서 실행권을 계속해서 넘기면서 해야 가능함
import asyncio
from std_msgs.msg import String
import threading
import rclpy
from rclpy.executors import MultiThreadedExecutor, SingleThreadedExecutor
from rclpy.node import Node
import time
class Ros2Handler:
def __init__(self):
self.node_obj = rclpy.create_node('node_name_here')
self.node_obj.publisher_1 = None
self.node_obj.publisher_2 = None
self.node_obj.subscription_1 = None
self.node_obj.subscription_2 = None
self.i = 0
self.msg = String()
self.set_up_sub_pub()
def set_up_sub_pub(self):
self.node_obj.subscription_1 = self.node_obj.create_subscription(
String,
'topic1',
self.listener_callback_1,
10)
self.node_obj.subscription_2 = self.node_obj.create_subscription(
String,
'topic2',
self.listener_callback_2,
10)
self.node_obj.publisher_1 = self.node_obj.create_publisher(String, 'topic1', 10)
self.node_obj.publisher_2 = self.node_obj.create_publisher(String, 'topic2', 10)
def listener_callback_1(self, msg: String):
print('listener_callback_1 msg : [{}]'.format(msg), flush=True)
def listener_callback_2(self, msg: String):
print('listener_callback_2 msg : [{}]'.format(msg), flush=True)
def run_publish_1(self, msg: String):
self.node_obj.publisher_1.publish(msg)
def run_publish_2(self, msg: String):
self.node_obj.publisher_2.publish(msg)
def get_node(self) -> Node :
return self.node_obj
# 방법 1. ---- Threading 스타트
class ThreadAgent:
""" 코드설명 :
publish 는 0.1 초 마다 pub 한다는 가정이고
ROS2 spin 을 Thread 로 제어 하는 구조. (Executor Class 를 이용하는 구조다)
노드가 한개라 SingleThreadedExecutor 로 구현해도 문제없다.
"""
def __init__(self):
self.handler = Ros2Handler()
self.msg: String = String()
def main_threading(self, args=None):
if rclpy.ok(): # 방어코드
pass
else:
rclpy.init(args=args)
_executor = MultiThreadedExecutor()
_executor.add_node(self.handler.get_node())
thread_task = threading.Thread(target=_executor.spin)
thread_task.start()
self.msg = String()
while True:
time.sleep(0.1)
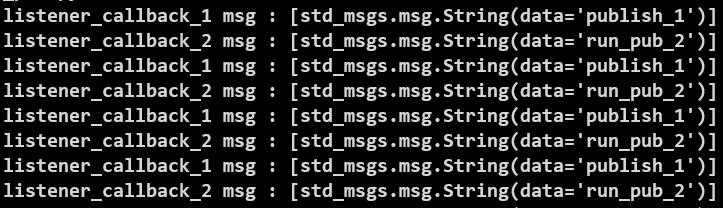
self.msg.data = 'publish_1'
self.handler.run_publish_1(self.msg)
time.sleep(0.1)
self.msg.data = 'run_pub_2'
self.handler.run_publish_2(self.msg)
thread_task.join() # 이밑으론 동작 X
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
self.handler.destroy_node()
rclpy.shutdown()
# 방법 2. ---- coroutine 스타트
class AsyncAgent:
""" 코드설명 :
publish 는 0.1 초 마다 pub 한다는 가정이고
ROS2 spin_once 을 코루틴으로 제어 하는 구조
"""
def __init__(self):
self.handler = Ros2Handler()
self.msg: String = String()
def main_async(self, args=None):
if rclpy.ok(): # 방어코드
pass
else:
rclpy.init(args=args)
_loop = asyncio.get_event_loop()
_loop.run_until_complete(self.run_task())
async def run_task(self):
await asyncio.gather(
self.run_sub(),
self.run_pub()
)
async def run_sub(self):
node_obj = self.handler.get_node()
while True:
await asyncio.sleep(0.05) # 필요하진 않은데 while 문 속도제어 용 sleep
await self.sub_spin(node_obj)
# await asyncio.create_task(self.sub_spin(node_obj)) # 동일한 내용 이렇게도 쓸 수 있음.
async def sub_spin(self, node_obj):
rclpy.spin_once(node=node_obj, timeout_sec=0.001) # timeout_sec 시간 만큼 실행권 가져오지 못함
# rclpy.spin(node=node_obj) # 이렇게 하면 spin 들어간 이후에 실행권을 가져오지 못함
await asyncio.sleep(0.1) # spin 속도를 제어 해주는 역할
async def run_pub(self):
while True:
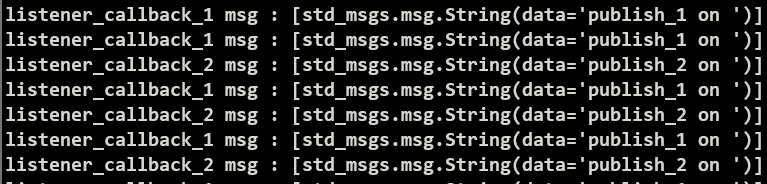
self.msg.data = 'publish_1 on '
self.handler.run_publish_1(self.msg)
await asyncio.sleep(0.1) # 0.1 초마다 pub 하는 조건때문에 만듬
self.msg.data = 'publish_2 on '
self.handler.run_publish_2(self.msg)
await asyncio.sleep(0.1) # 0.1 초마다 pub 하는 조건때문에 만듬
if __name__ == '__main__':
rclpy.init()
a = ThreadAgent() # 쓰레드
a.main_threading()
# b = AsyncAgent() # 어싱크
# b.main_async()
콘솔 결과 :
코루틴 돌렸을때
멀티쓰레드 돌렸을때
'ros2_python > Ros2 msg,srv,action,parm' 카테고리의 다른 글
| ROS2 service blocking 피하는 방법 (0) | 2023.07.01 |
|---|---|
| Service 비교 ROS1 vs ROS2 (spin돌려야되나?) (0) | 2023.07.01 |
| spin_until_future_complete 예제 (0) | 2022.09.15 |
| Ros2 Node 클래스 설명 // 노드랑 sub or pub config 값 바인딩 할때 (0) | 2022.09.07 |
| python MultiThread( publisher 2개, suscriber 2개 ) (0) | 2022.09.01 |

댓글