참고 :
https://runebook.dev/ko/docs/cmake/command/execute_process
CMake - execute_process 하나 이상의 자식 프로세스를 실행하십시오.
하나 이상의 자식 프로세스를 실행하십시오. 주어진 하나 이상의 명령 시퀀스를 실행합니다. 명령은 파이프 라인으로 동시에 실행되며 각 프로세스의 표준 출력은 다음 프로세스의 표준 입력으
runebook.dev
https://cmake.org/cmake/help/latest/command/find_package.html
find_package — CMake 3.25.1 Documentation
Note The Using Dependencies Guide provides a high-level introduction to this general topic. It provides a broader overview of where the find_package() command fits into the bigger picture, including its relationship to the FetchContent module. The guide is
cmake.org
https://enssionaut.com/board_robotics/1264
로봇 - ROS(Robot Operating System) 개념과 활용 - 10. CMakeLists.txt 파헤치기
CMakeLists.txt는 빌드 설정에 관련된 매우 중요한 파일이지만 주석의 압박과 익숙하지 않은 사용법 때문에 매번 대충 작성했던 경험이 있습니다. 관련 가이드를 찾아 보니 생각보다 간단한 규칙으
enssionaut.com
https://www.tuwlab.com/ece/27260
[CMake 튜토리얼] 2. CMakeLists.txt 주요 명령과 변수 정리 - ECE - TUWLAB
▶ 이 글에서는 CMake 빌드 스크립트인 CMakeLists.txt 파일을 작성하는 방법에 대해 다룹니다. CMake 2.8.x 버전 기준이며, C언어 프로젝트를 기준으로 자주 사용되는 명령과 변수들을 선별하여 기능에
www.tuwlab.com
http://wiki.ros.org/ko/ROS/Tutorials/BuildingPackages
ko/ROS/Tutorials/BuildingPackages - ROS Wiki
패키지 빌드 모든 시스템 의존성이 설치되었으면, 이제 우리가 만든 패키지를 빌드할 때 입니다. rosmake 사용하기 rosmake는 make 명령과는 조금 다른, ROS만의 특별한 마술을 수행합니다. 만약 rosmake
wiki.ros.org
http://wiki.ros.org/catkin/commands/catkin_make
catkin/commands/catkin_make - ROS Wiki
catkin_make is a convenience tool for building code in a catkin workspace. catkin_make follows the standard layout of a catkin workspace, as described in REP-128. Usage You should always call catkin_make in the root of your catkin workspace, assuming your
wiki.ros.org
catkin_make <- cmake 랑 make를 합쳐서 특정 빌드를 하는 구조.
-
$ cd ~/catkin_ws $ catkin_make
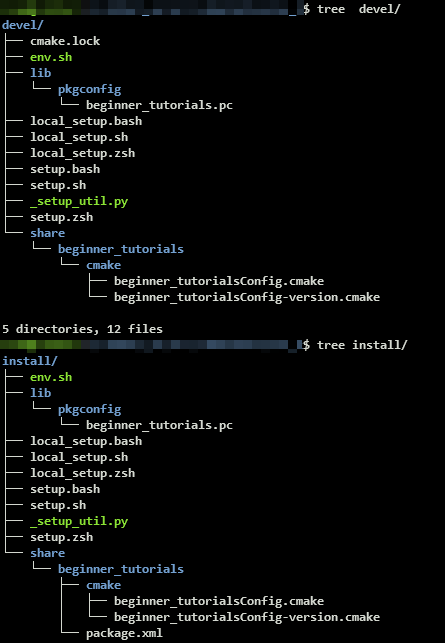
위의 내용을 풀어서 쓰면 [ install 은 실행바이너리와 라이브러리등 실행파일, devel은 install 파일들 + 코드파일까지 ]
-
$ cd ~/catkin_ws $ cd src $ catkin_init_workspace $ cd .. $ mkdir build $ cd build $ cmake ../src -DCMAKE_INSTALL_PREFIX=../install -DCATKIN_DEVEL_PREFIX=../devel $ make

또한 install folder를 만들어 배포용으로 작업 할 수 도 있다. ( src에 작성한 코드가 없으면 의미 없음 )
-
$ cd ~/catkin_ws $ catkin_make install
위의 경우는 아래와 동일하다.
-
$ cd ~/catkin_ws/build # If cmake hasn't already been called $ cmake ../src -DCMAKE_INSTALL_PREFIX=../install -DCATKIN_DEVEL_PREFIX=../devel $ make $ make install

키워드
cmake_minimum_required
- CMake 최소 버전
project
- 패키지 이름
set
- Variable 선언 , 1:1 대응이나 밑에 예시처럼 해도 된다.
unset
- Variable 취소
execute_process
- COMMAND 명령을 실행 : 실행 후 실행에 관련 alias를 이용할 수 있다 위의 예시 처럼
message
- 메시지 출력
find_pacakge
- 빌드에 필요한 CMake, catkin 관련 패키지 탐색
add_message_files(), add_service_files(), add_action_files()
- ROS 메시지, 서비스, 액션 생성기
generate_messages()
- 메시지, 서비스, 액션 생성
catkin_package()
- catkin 관련 빌드 정보 지정
add_library(), add_executable(), target_link_libraries()
- 라이브러리, 실행 파일 지정
catkin_add_gtest()
- 유닛 테스트
install()
- 생성된 target에 대한 설치 옵션 지정
if 문
if(NOT _res EQUAL 0 AND NOT _res EQUAL 2)
endif()
for 문
foreach(path ${CMAKE_PREFIX_PATH})
endforeach()
설명 및 예시
cmake_minimum_required
cmake_minimum_required(VERSION 3.0.2)
- CMake 최소 버전
project
project(Project)
- 패키지 이름
set
set(CATKIN_TOPLEVEL TRUE)
set(_cmd "catkin_find_pkg" "catkin" "${CMAKE_SOURCE_DIR}")
- Variable 선언 , 1:1 대응이나 밑에 예시처럼 해도 된다.
unset
- Variable 취소
execute_process
execute_process(COMMAND ${_cmd}
RESULT_VARIABLE _res
OUTPUT_VARIABLE _out
ERROR_VARIABLE _err
OUTPUT_STRIP_TRAILING_WHITESPACE
ERROR_STRIP_TRAILING_WHITESPACE
)
- COMMAND 명령을 실행 : 실행 후 실행에 관련 alias를 이용할 수 있다 위의 예시 처럼
message
message(FATAL_ERROR "Search for 'catkin' in workspace failed (${_cmd_str}): ${_err}")
- 메시지 출력
find_pacakge
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
위 내용을 바꿔서 보자면 밑에 내용이랑 동일함.
find_package(catkin REQUIRED)
find_package(roscpp REQUIRED)
find_package(rospy REQUIRED)
find_package(std_msgs REQUIRED)
또 예를들어 이런식으로 쓰면 C++ Boost의 threads를 사용하고자 할 경우 : find_package(Boost REQUIRED COMPONENTS thread)
- 빌드에 필요한 CMake, catkin 관련 패키지 탐색
add_message_files(), add_service_files(), add_action_files()
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
- ROS 메시지, 서비스, 액션 생성기
generate_messages()
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs
# )
- 메시지, 서비스, 액션 생성
catkin_package()
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES test_3
# CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
)
- catkin 관련 빌드 정보 지정
add_library(), add_executable(), target_link_libraries()
- 라이브러리, 실행 파일 지정
catkin_add_gtest()
- 유닛 테스트
install()
- 생성된 target에 대한 설치 옵션 지정
if 문
if(NOT _res EQUAL 0 AND NOT _res EQUAL 2)
# searching fot catkin resulted in an error
string(REPLACE ";" " " _cmd_str "${_cmd}")
message(FATAL_ERROR "Search for 'catkin' in workspace failed (${_cmd_str}): ${_err}")
endif()
for 문
foreach(path ${CMAKE_PREFIX_PATH})
if(EXISTS "${path}/.catkin")
list(FIND catkin_search_path ${path} _index)
if(_index EQUAL -1)
list(APPEND catkin_search_path ${path})
endif()
endif()
endforeach()
'언어 정리 > 빌드툴(catkin_make,make,cmake)' 카테고리의 다른 글
| CMake CMakeLists.txt 설명 (0) | 2023.01.02 |
|---|---|
| Make Makefile 설명 및 문법 (1) | 2023.01.02 |
| make -> cmake -> catkin_make (1) | 2023.01.02 |


댓글