roscore = Master + rosout + Parameter Server
| Master Namer Service Node 끼리 찾게끔 (Naming으로) |
Rosout stdout/stderr ex) publish(pos) 할떄 pos 에 대한 data를 보내줌 |
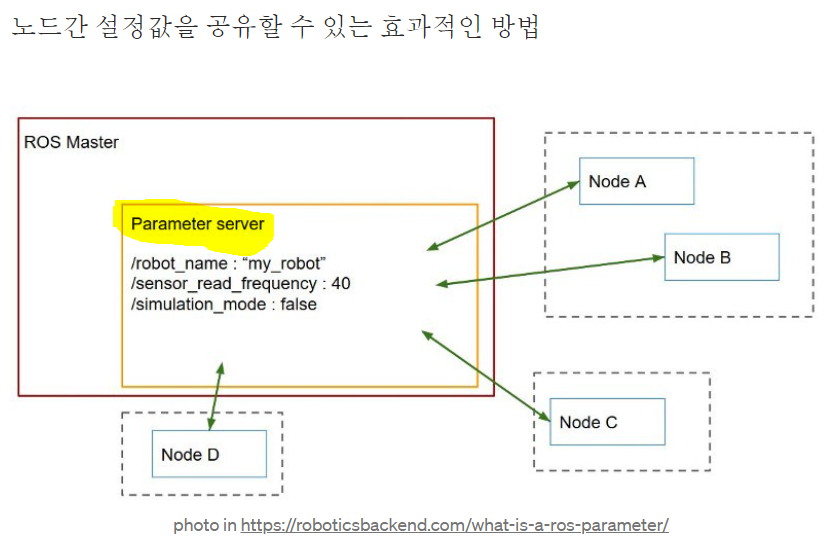
Parameter Server 노드끼리 parameter를 공유해서 사용 ex) 전역변수처럼 사용 밑에 그림참조 |
'ROS_C++_정리 > 기본개념' 카테고리의 다른 글
| ros msg 기본구조 { talker-lister & doubler(구독,발행같이) } (0) | 2022.01.15 |
|---|

댓글