사용 안하는 Node와 코드 삭제 후 , IWH_pose_node 에서 moveit노드와 write노드에 각각 xyz,흡착on/off data를 형식에 맞게 publish 하는 코드를 짬.
실행방법
roslaunch swiftpro pro_control.launch
rosrun swiftpro IWH_pose_node
실행 후 ,
"x,y,z,흡착유무(0/1)" 에 맞춰서 CLI화면에 입력 시 로봇 기동.
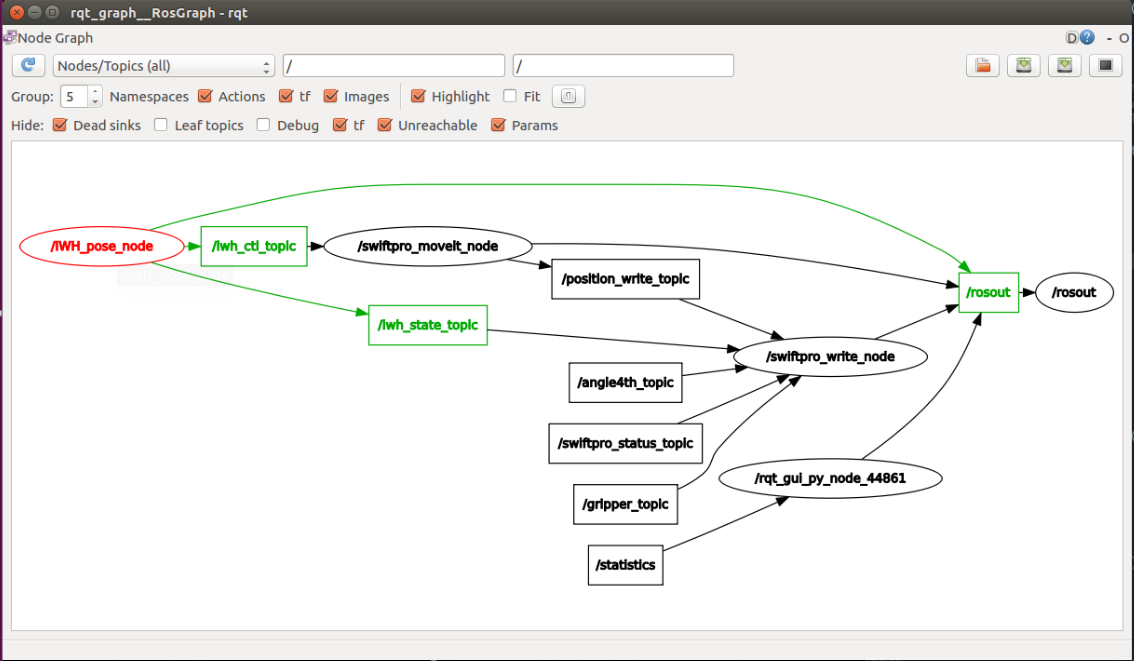
IWH_pose_node 에서 swiftpro_moveit_node (msg 타입 : swiftpro::position) 와
swiftpro_write_node (msg 타입 : swiftpro::SwiftproState)에 publish 함.
rqt_graph 구성도
시연 동영상
1. 컴퓨터 화면 https://youtu.be/RTcVo32lmqo
2. 시연화면
3. 코드 zip 파일
'프로젝트정리, uArm관련 > uArm project' 카테고리의 다른 글
| 1_2단계 (Arm 기본 동작구현)(구동중)_2022_01_21 (0) | 2022.01.21 |
|---|---|
| 1_1단계 (Arm 기본 동작구현)(계획)_2022_01_16 (0) | 2022.01.17 |
| ROS UARM demo.launch(시연 동영상) (0) | 2022.01.16 |



댓글