소스코드 권한 +X 로 변경 해주고 나서,
roscd [패키지] 들어가서 해당 디렉토리에 있는 package.xml , CMakeLists.txt 코드 수정 해줘야 한다.
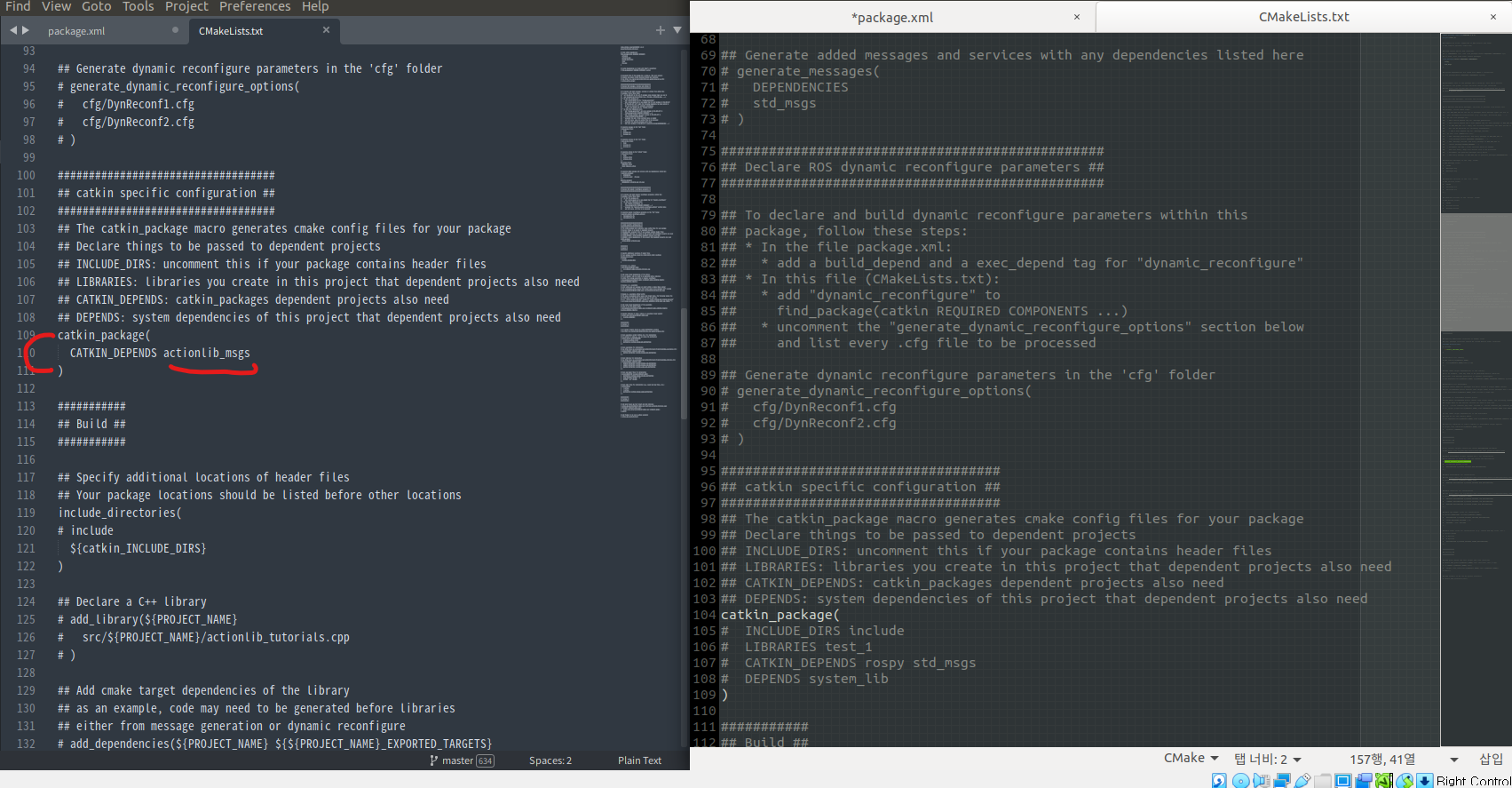
package.xml
빌드할때, 실행할때 필요한 의존성 패키지(라이브러리)들을 명시한다.

CMakeLists.txt
1.(이미 존재하는 다른 package와 함께) 사용할 패키지 명을 추가 시켜준다.
캣킨이 찾는 패키지들이 뭔지 알 수 있도록 find_package() 함수에 사용할패키지들을 추가해준다.
( actionlib , actionlib_msgs , message_generation )

2. ~~.action 자료형 파일을 추가한다.
지정한 액션에 대한 의존성을 나열해야 한다. 따라서 actionlib_msgs ,std_msgs를 의존성으로서 명시적으로 나열한다.

3. 마지막으로 actionlib_msgs를 캣틴에 대한 의존서으로 추가한다.
4. 사용하는 python 경로 명시 해야함 , 캣킨이 뭐를 빌드할지

'ROS_python_정리 > 패키지관련,CMake,package관련' 카테고리의 다른 글
| roslaunch tag 종류 : XML 파일 속 태그 설명 (0) | 2023.12.19 |
|---|---|
| ROS1 구조 및 빌드 (0) | 2022.12.31 |
| python ros 패키지 생성 (0) | 2022.04.22 |
| msg srv 시 package.xml , CMakeLists.txt (0) | 2022.04.09 |


댓글