https://docs.ros.org/en/foxy/Tutorials/Writing-A-Simple-Py-Publisher-And-Subscriber.html
우선 새로운 package 만들어 주고
ros2 pkg create --build-type ament_python py_pubsub~/dev_ws/src/py_pubsub/py_pubsub 에 드가서 python 파일 코딩하면 됨.
pulisher 기본예제
기본예제 다운
wget https://raw.githubusercontent.com/ros2/examples/foxy/rclpy/topics/minimal_publisher/examples_rclpy_minimal_publisher/publisher_member_function.py
기본예제
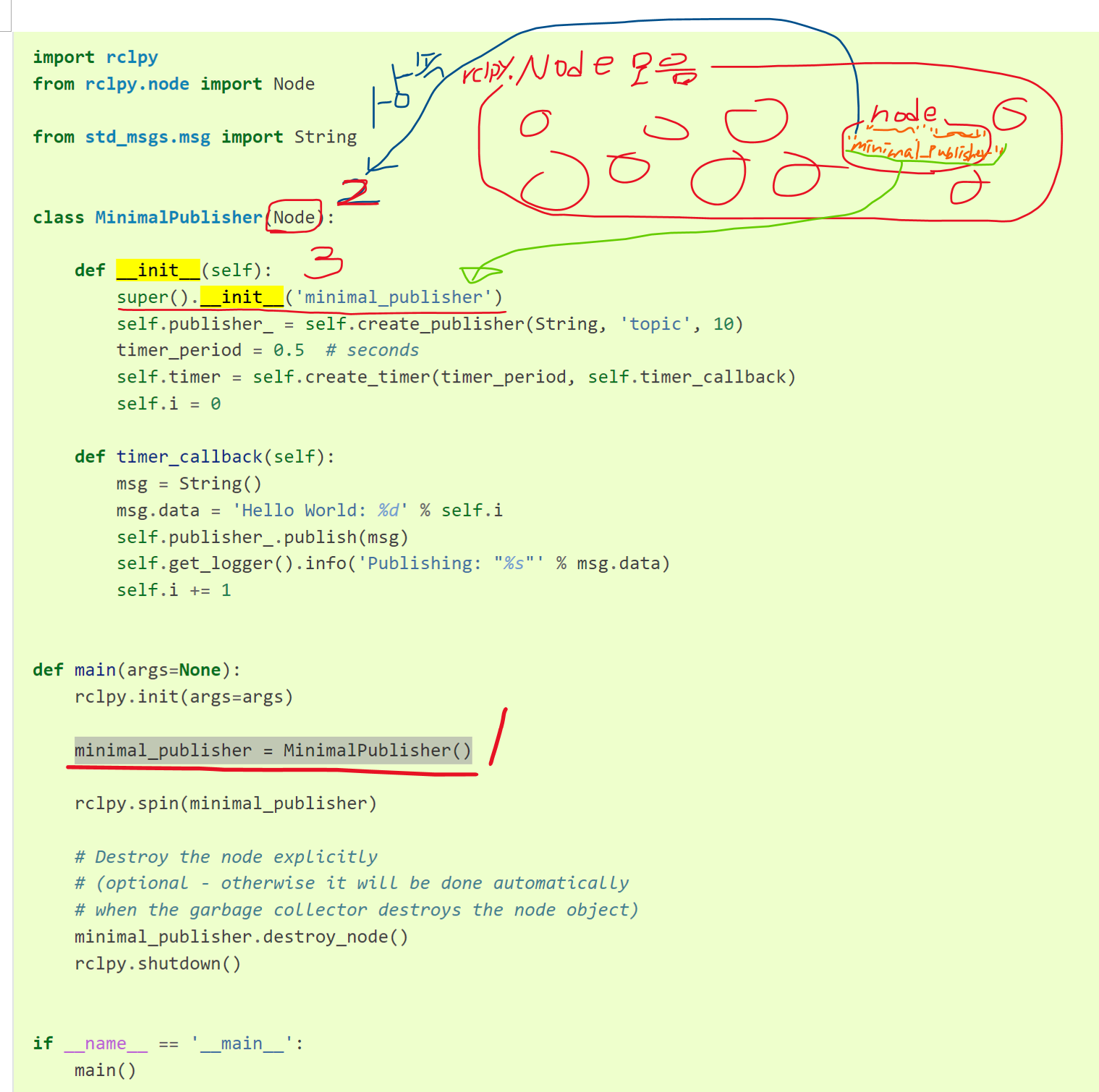
publisher_member_function.py
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MinimalPublisher(Node):
def __init__(self):
super().__init__('minimal_publisher')
self.publisher_ = self.create_publisher(String, 'topic', 10)
timer_period = 0.5 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
msg = String()
msg.data = 'Hello World: %d' % self.i
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg.data)
self.i += 1
def main(args=None):
rclpy.init(args=args)
minimal_publisher = MinimalPublisher()
rclpy.spin(minimal_publisher)
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
minimal_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
subscriber 기본예제
wget https://raw.githubusercontent.com/ros2/examples/foxy/rclpy/topics/minimal_subscriber/examples_rclpy_minimal_subscriber/subscriber_member_function.py
ls
__init__.py publisher_member_function.py subscriber_member_function.py
구독자 노드의 코드는 게시자의 코드와 거의 동일합니다. 생성자는 게시자와 동일한 인수를 가진 구독자를 만듭니다. 주제 자습서에서 게시자와 구독자가 통신할 수 있도록 하려면 게시자와 구독자가 사용하는 주제 이름과 메시지 유형이 일치해야 합니다.
subscribe.py
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MinimalSubscriber(Node):
def __init__(self):
super().__init__('minimal_subscriber')
self.subscription = self.create_subscription(
String,
'topic',
self.listener_callback,
10)
self.subscription # prevent unused variable warning
def listener_callback(self, msg):
self.get_logger().info('I heard: "%s"' % msg.data)
def main(args=None):
rclpy.init(args=args)
minimal_subscriber = MinimalSubscriber()
rclpy.spin(minimal_subscriber)
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
minimal_subscriber.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()예제 코드 리뷰
ros1이랑 가장 많이 바뀐 부분이 pulbisher 쪽이랑 init 부분이다
ros1은 자동으로 루프돌고, sleep으로 제어하는 반면에
ros2쪽에서는 다양하게 쓸 수 있게됨. 지금 밑에 코드는 create_timer()함수로 ros1처럼 사용하는거고
create_timer()함수가 아니라 다른 이벤트 함수라든가, 여러 방법들로 다양한 조건에서 publish 가 가능하게 됬다.

create_pulisher, create_subcription 에서 사용되는 메시지 타입 "String"은 ros2 깔면 제공되는 기본 메시지타입


파이썬 상속개념이 헷갈림 참고용 사이트 참고
https://dojang.io/mod/page/view.php?id=2386
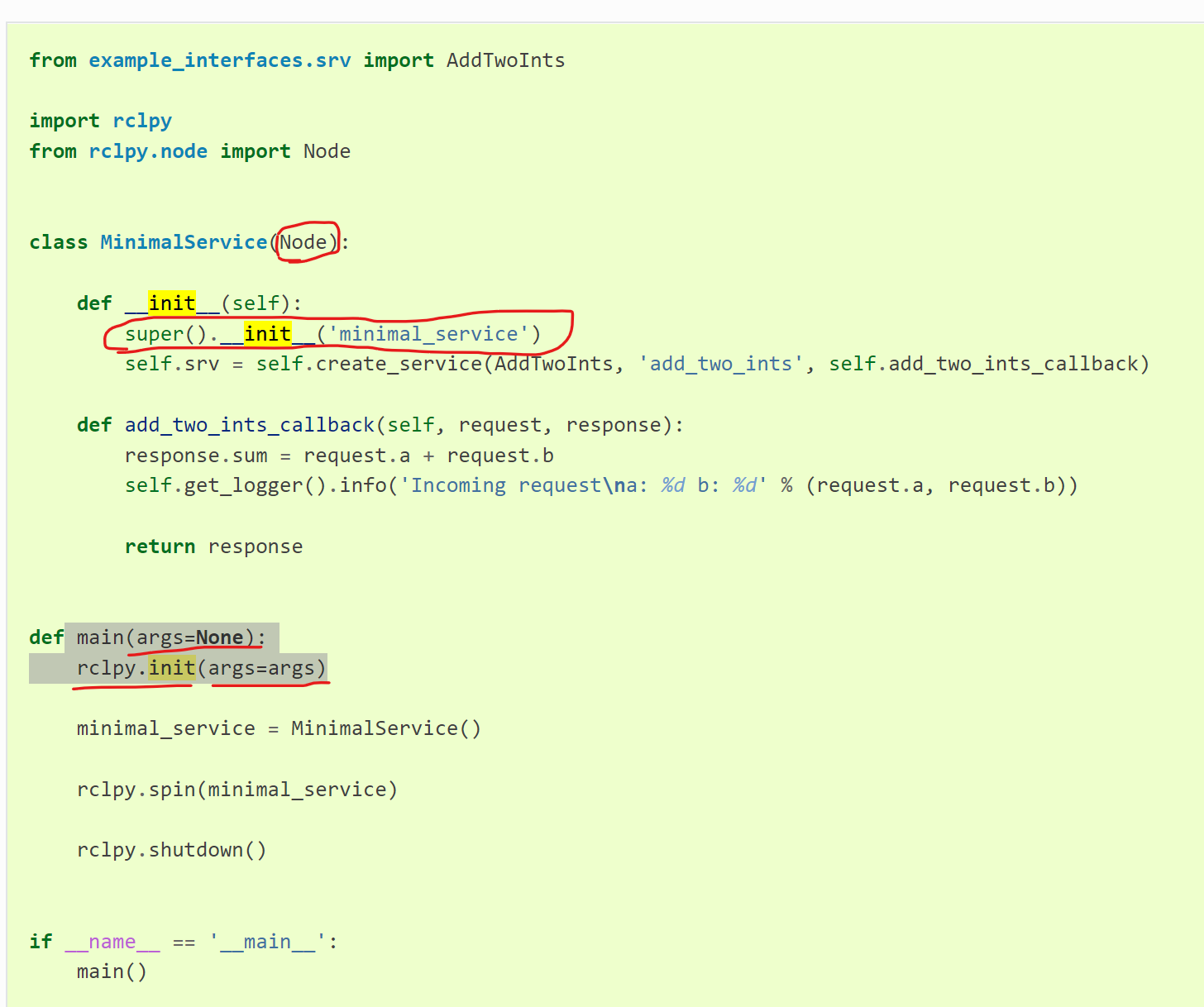
init 부분이 많이 바뀜 ,그래도 sub나 pub나 같은 형식임 , service 부분도 동일
노드중에 "Node"라는 노드 안에 'minimal_publisher'라는 객체가 있는데 그거를 상속해서 쓰겠다 라는 방법임
service init 부분
종속성 추가 부분
1.
dev_ws/src/py_pubsub <- 여기 위치에 있는 package.xml 수정 ★
전 글에 있는 디스크립션 메인테이너 라이센스 알아서 수정하고
package.xml
<exec_depend>rclpy</exec_depend>
<exec_depend>std_msgs</exec_depend>import 해야할 lib들을 추가함
이부분 종속성으로 추가한다.
2.
디스크립션 메인테이너 라이센스 + 메인테이너이메일까지 알아서 수정하시공~ (패키지.xml이랑 동일해야함 )
setup.py
entry_points={
'console_scripts': [
'talker = py_pubsub.publisher_member_function:main',
'listener = py_pubsub.subscriber_member_function:main',
],
},colcon build할 python 파일 추가해준다
3.
setup.cfg
[develop]
script-dir=$base/lib/py_pubsub
[install]
install-scripts=$base/lib/py_pubsub단순히 셋업툴에 excutables한 "lib"들을 넣는 코드이다.
PS>> "ros2 run @@@ ###" 할때 패키지 인자 부분인 @@@ 을
setup.cfg 파일을 참조해 ros2 run 한다.
빌드 및 실행
ROS 2 시스템의 일부로 rclpy 및 std_msgs 패키지가 이미 설치되어 있을 수 있습니다. 다음을 빌드하기 전에 작업 공간의 루트(dev_ws)에서 rosdep을 실행하여 누락된 종속성을 확인하는 것이 좋습니다.
rosdep install -i --from-path src --rosdistro foxy -ysrc 에 들어있는 파일들을 foxy(20.04)에 맞춰서 종속성이 필요한 파일들을 인스톨한다. 정도
colcon build --packages-select py_pubsub
. install/setup.bash
ros2 run py_pubsub talker출력 결과
[INFO] [minimal_publisher]: Publishing: "Hello World: 0"
[INFO] [minimal_publisher]: Publishing: "Hello World: 1"
[INFO] [minimal_publisher]: Publishing: "Hello World: 2"
[INFO] [minimal_publisher]: Publishing: "Hello World: 3"
[INFO] [minimal_publisher]: Publishing: "Hello World: 4"
...
ros2 run py_pubsub listener출력 결과
10부터 출력되는 이유를 아는게 중요함
[INFO] [minimal_subscriber]: I heard: "Hello World: 10"
[INFO] [minimal_subscriber]: I heard: "Hello World: 11"
[INFO] [minimal_subscriber]: I heard: "Hello World: 12"
[INFO] [minimal_subscriber]: I heard: "Hello World: 13"
[INFO] [minimal_subscriber]: I heard: "Hello World: 14"
'ros2_python > Ros2 msg,srv,action,parm' 카테고리의 다른 글
| ros2_msg 토픽 example(executor사용==멀티쓰레드) (0) | 2022.07.05 |
|---|---|
| ros2_msg 토픽 example(executor사용==싱글쓰레드) (0) | 2022.06.28 |
| ros2_python코드에서 param 데이터 사용법 (0) | 2022.04.27 |
| 사용자 정의 ros2 msg, srv파일 구성 (0) | 2022.04.27 |
| ros2_srv 토픽 simple example (0) | 2022.04.27 |




댓글